К рулевому управлению предъявляют следующие требования:
- Обеспечение высокой маневренности, при которой возможны крутые и быстрые повороты на сравнительно ограниченных площадях.
- Легкость управления, оцениваемая усилием, прилагаемым к рулевому колесу.
- Высокая степень надежности действия, поскольку выход рулевого управления из строя в большинстве случаев заканчивается аварией или катастрофой.
- Правильная кинематика поворота, при которой колеса всех осей автомобиля катятся по концентрическим окружностям (невыполнение этого требования приводит к скольжению шин по дороге, интенсивному их изнашиванию, излишним расходам мощности двигателя и топлива).
- Умеренное ощущение толчков на рулевом колесе при езде по плохим дорогам, что снижает безопасность движения.
- Точность следящего действия, в первую очередь кинематического, при котором любому заданному положению рулевого колеса будет соответствовать вполне определенная заранее рассчитанная крутизна поворота.
- Отсутствие в рулевом управлении больших зазоров, приводящих к плохому держанию автомобилем дороги, к его вилянию.
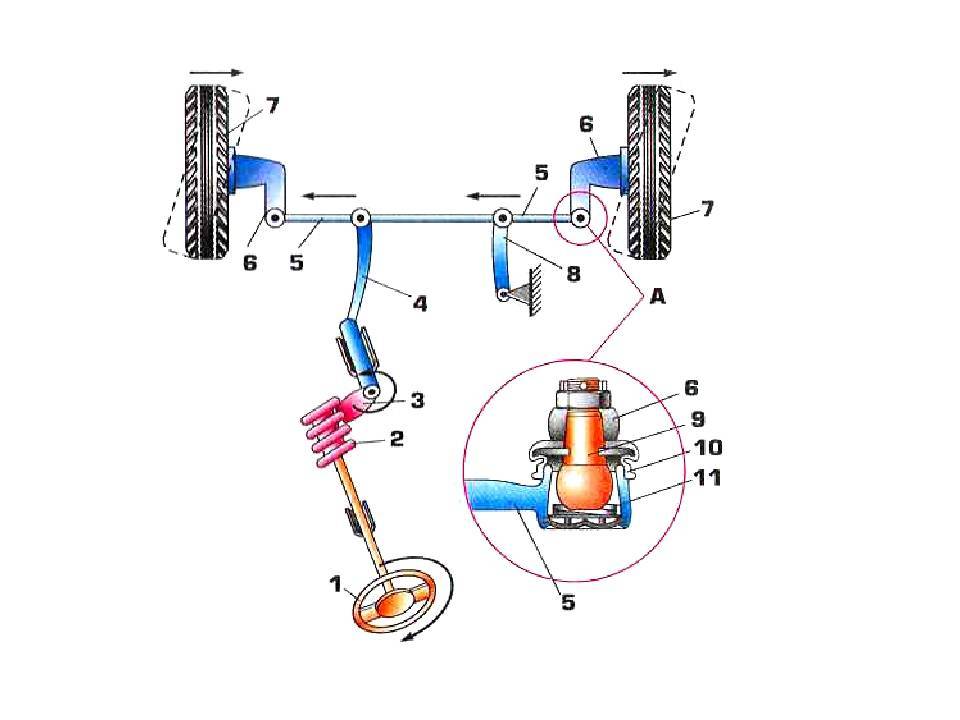
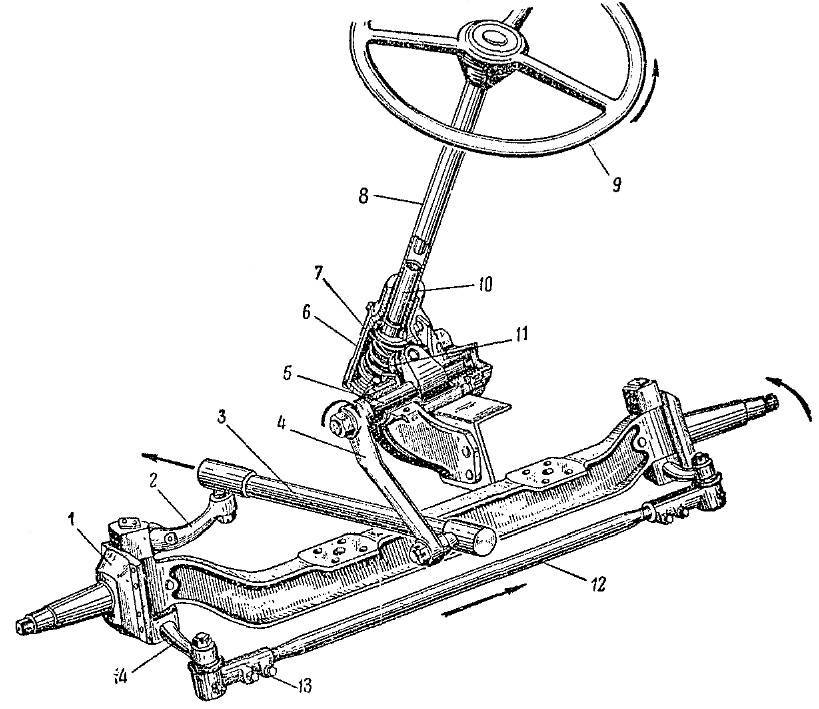
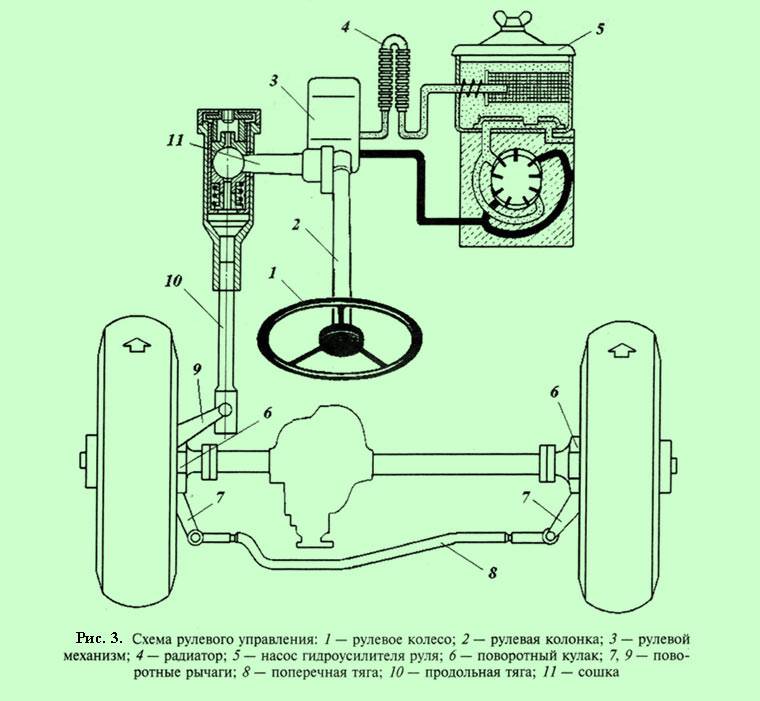
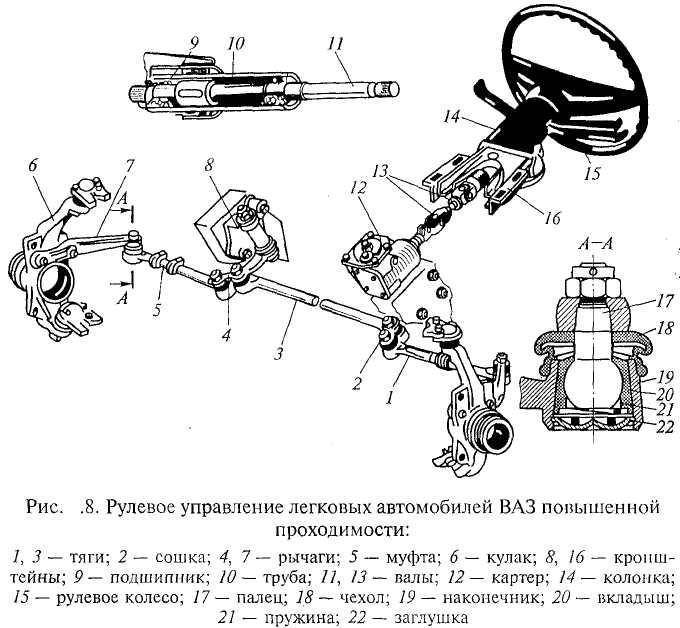
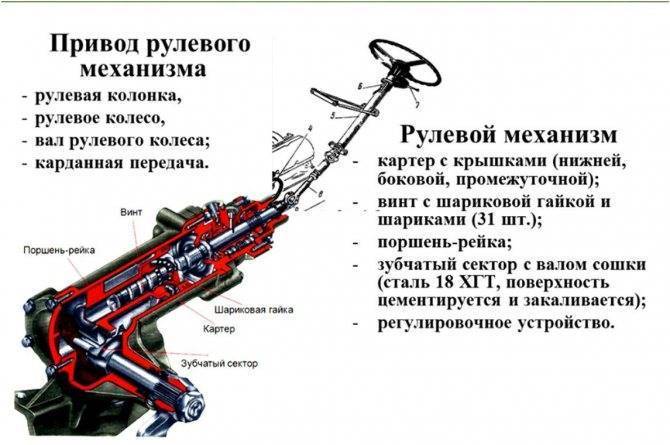
Рулевое управление машины с передними управляемыми колесами состоит из переднего моста, трапеции управления, рулевого привода и рулевого механизма (рисунок а). Передние колеса устанавливают на цапфах 13, соединенных с передней осью шкворнями. Все это образует передний мост.
На цапфах закреплены рычаги 11, связанные шарнирно с поперечными тягами 12, Рычаги 11 и поперечные тяги 12 с передней осью 14 составляют трапецию управления, предназначенную для поворота колес.
Тяги 22 соединены с рулевой сошкой 15, сидящей на валу 10 с закрепленным на нем зубчатым сектором 8. Рулевая сошка и вал 10 образуют рулевой привод, передающий усилие от сошки к поворотным цапфам.
Зубчатый сектор 8 находится в зацеплении с поршнем-рейкой 7, укрепленной на винте 6 гидроусилителя, и образует рулевой механизм. Действие рулевого механизма облегчается гидравлическим усилителем. Усилие к рулевому механизму передается от рулевого колеса 2, сидящего на валу 4, через карданную передачу 5 на винт 6.
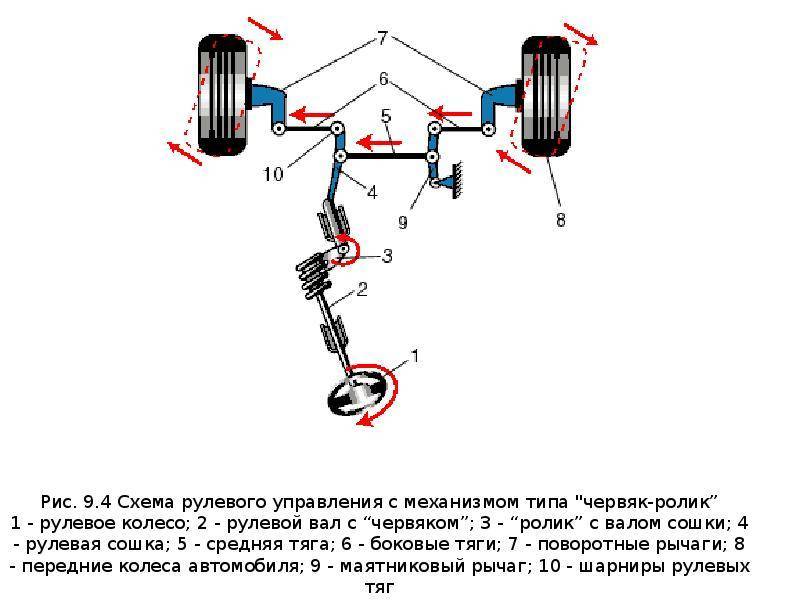
В рулевых механизмах применяют передачи типа червяк ролик, червяк — сектор, червяк — червячная шестерня и др. Передачи первого типа наиболее распространены в рулевых механизмах тракторов и грузовых автомобилей.
На отечественных автомобилях принято левое (по ходу) рулевое управление, обеспечивающее лучший обзор. У тракторов рулевое управление расположено справа, благодаря чему создаются условия для лучшего наблюдения за работой агрегата и более точного его вождения при выполнении ряда технологических операций (пахота, косьба и т. д.).
С целью облегчения управления трактором или автомобилем применяют усилители рулевого управления преимущественно гидравлического типа (в тракторах К-701, Т-150К, МТЗ-80, ЛТЗ-55, в автомобиле ЗИЛ-130).
Управляемые (направляющие) колеса трактора (автомобиля) должны быть установлены правильно, чтобы износы шин и затраты мощности на качение были наименьшими, устойчивость — хорошей, а управление — легким. Установка управляемых (передних) колес характеризуется их развалом в вертикальной плоскости и схождением в горизонтальной, а также наклоном шкворней поворотных цапф в продольной и поперечной плоскостях.
Развал колес (рисунок б) определяется установкой цапф колес с наклоном их шипов вниз. Это позволяет уменьшить нагрузки на внешний подшипник и улучшить управляемость. Угол развала колес различных машин а < 2°.
Схождение колес (рисунок г) находят по разнице размеров А и Б между серединами колес впереди и сзади, если смотреть на них сверху. Схождение колес обеспечивает правильное параллельное качение их при наличии развала и зазоров в шкворнях, рулевых тягах и подшипниках колес. В руководстве по каждой машине указывают требуемые размеры А и Б, которые проверяют специальными приспособлениями и регулируют, изменяя длину поперечной тяги рулевого управления. Схождение колес находится в пределах 2…12 мм.
Поперечный в (рисунок б) и продольный у (рисунок в) наклоны шкворня способствуют повышению устойчивости колеса в среднем положении. Угол у, характеризующий поперечный наклон шкворня, составляет у автомобилей 6…8° и определяется соответствующей формой передней оси. Угол у, характеризующий продольный наклон шкворня, изменяется в пределах 0…40 и определяется установкой цапфы передней оси в наклонном положении. Углы наклона шкворней в процессе эксплуатации машин регулировкам не подлежат.
Пневматический усилитель руля
Поскольку в тормозах работал сжатый воздух, решение лежало на поверхности — сделать усилитель пневматическим. Такие устройства были просты и дешевы, но очень шумны. При этом точно спрогнозировать, насколько надо крутить «баранку», чтобы вписаться в поворот, мог только очень опытный водитель. Дело в том, что пневматика работала по принципу «включено-выключено» — если руль повернуть чуть-чуть, усилитель не работал, на больших же углах «баранка» уже не сопротивлялась вращению, а уже сама рвалась из рук и колеса мгновенно выворачивались полностью. А попадись на дороге яма или выбоина, колеса из-за большой упругости воздуха могли повернуть, куда им вздумается.
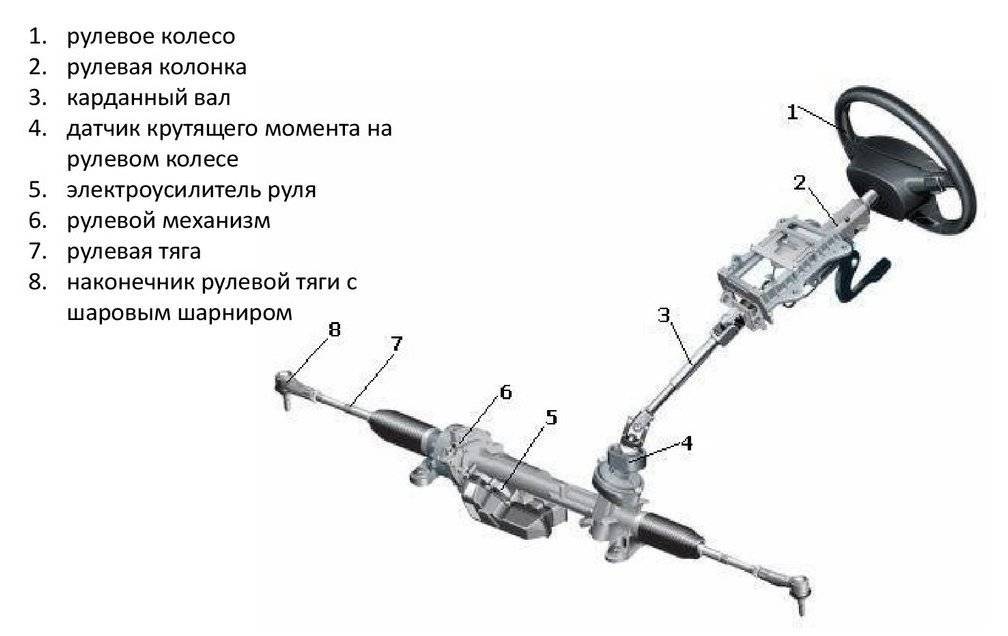
Система рулевого управления

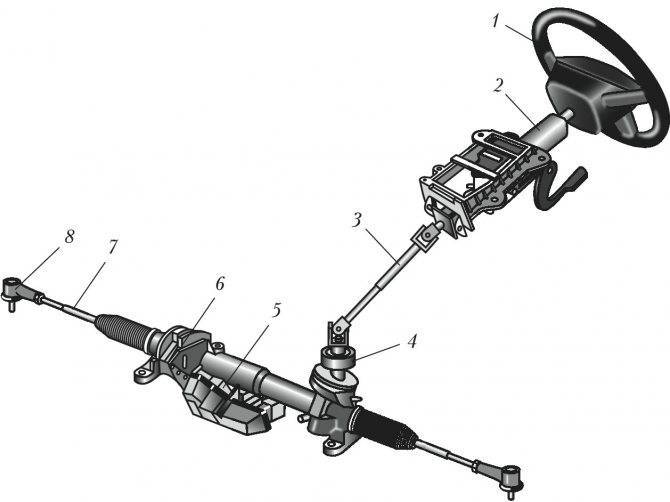
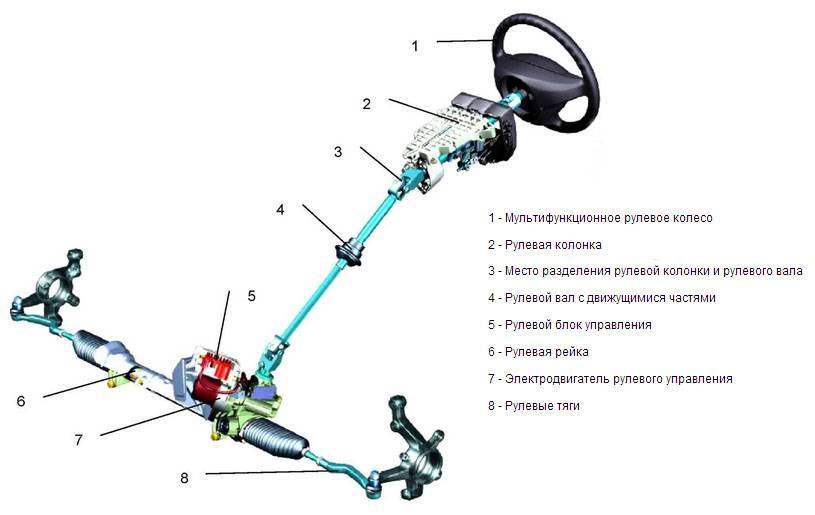
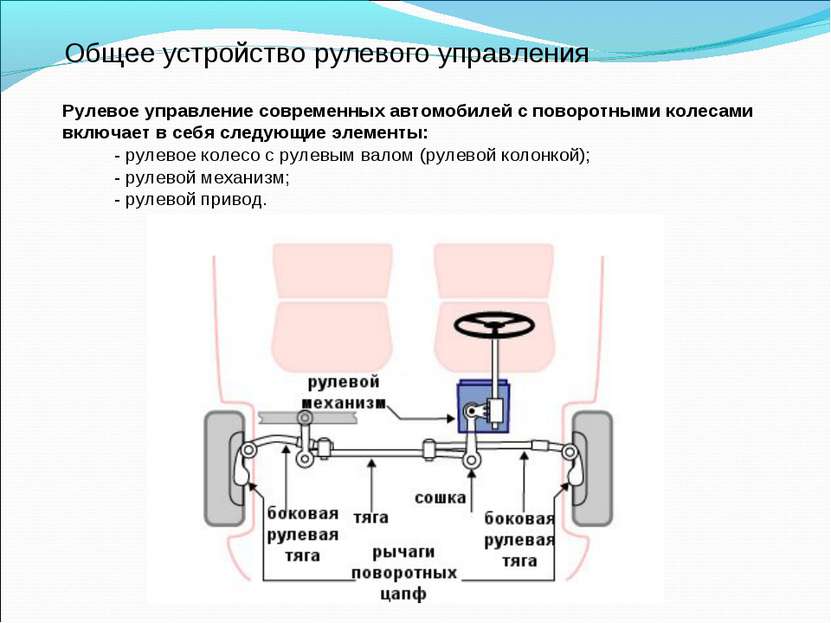
В конструктивном плане в состав системы рулевого управления автомобиля входит несколько важнейших деталей:
- Руль, именуемый также рулевым колесом. Его роль – указание направления движения автомобилем, делегация действий оператора на другие узлы и агрегаты.
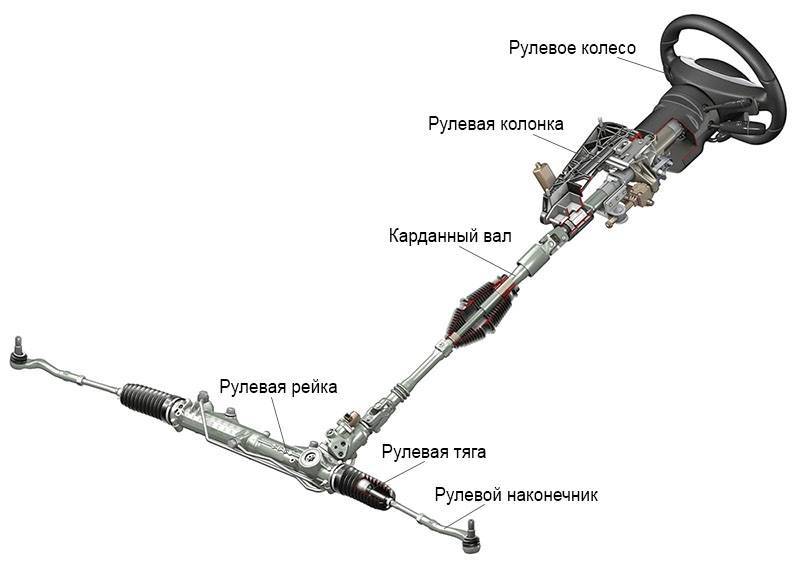
- Рулевая колонка – та часть конструкции, которая в ответе за передачу усилий от руля на другие части механизма. Внешне она выполнена в виде вала, оснащенного шарнирами. Чтобы гарантировать безопасность езды, колонку оборудуют системами складывания и блокировки, привод которых может быть механическим либо электрическим. На рулевой колонке находится замок зажигания, а также рычаги управления стеклоочистителями и фарами.
- Рулевой механизм, выполняющий изменение усилия, которое создается водителем путем поворота руля, и его передачу на ведущие колеса.
- Усилитель – часть конструкции, повышающая усилие, которое передается от рулевого колеса на привод, и заметно упрощающая процесс управления транспортным средством.
- Дополнительные элементы, такие как амортизатор или демпфер и пр.
Это продольные и поперечные тяги и сошки, поперечные рычаги, рычаг поворотной цапфы и прочие элементы конструкции.
Водитель поворачивает управляемые колеса, а надо отметить, что у многих моделей грузовых авто управляемыми, то есть ведущими являются все колеса, в таком случае радиус поворота минимален, что особенно актуально, когда ТС эксплуатируется в условиях ограниченного пространства.
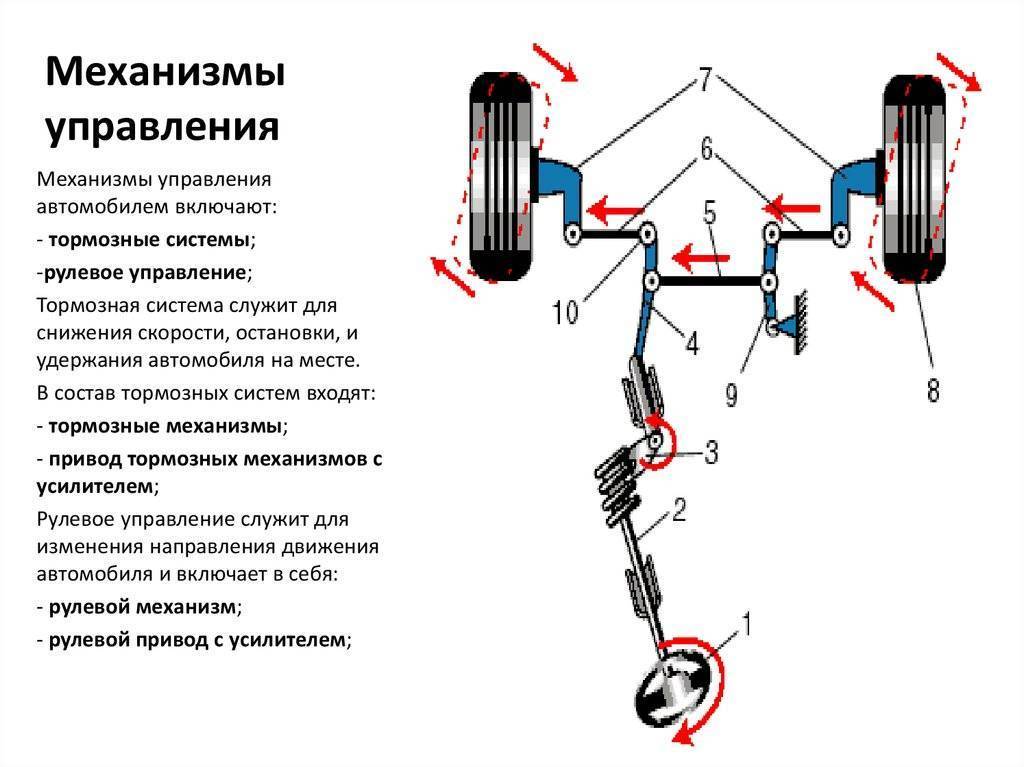
Говоря о схеме рулевого управления, его устройстве более детально, необходимо упомянуть такие конструктивные составляющие:
- поперечная тяга;
- рычаг (нижний);
- рычаг (верхний);
- поворотная цапфа;
- рулевая передача;
- продольная тяга;
- сошка рулевого привода;
- рулевой вал;
- рулевое колесо.
Требования к системе рулевого управления
Система рулевого управления преобразует создаваемые водителем вращательные движения рулевого колеса в изменение угла поворота управляемых колес автомобиля. Конструкция и схема системы призваны обеспечить удобное и безопасное рулевое управление автомобиля во всех ситуациях и на всех скоростях. Вся система рулевого управления, от рулевого колеса и до управляемых колес, должна в этих целях обладать следующими свойствами.


Передача инициируемых водителем рулящих движений на рулевом колесе без люфта особенно важна при движении по прямой. Это гарантирует безопасное, неутомительное для водителя управление автомобилем, прежде всего на средних и высоких скоростях.
Поэтому рулевой механизм должен быть очень жестким. Это необходимо для обеспечения точной управляемости и преодоления отклонения от заданного угла поворота рулевого колеса под действием изменяющихся возвратных сил, возникающих, например, при изменении бокового ускорения.
Слабое трение в рулевом механизме позволяет водителю получать через реактивные силы тактильную обратную связь, дающую информацию о коэффициенте сцепления между дорогой и шинами. Слабое трение также помогает колесам выровняться для движения по прямой. В системах рулевого управления с мускульной энергией слабое трение обеспечивает небольшие движущие силы. В системах рулевого управления с усилителем оно повышает эффективность управления.
Кинематические параметры рулевого управления и конструкция управляемой оси автомобиля должны быть такими, чтобы водитель мог чувствовать величину сцепления между шинами и дорогой.
Требования к рулевому управлению
Требованиями к функционированию системы рулевого управления являются:
Легкое, безопасное рулевое управление автомобилем. Сюда, к примеру, относится тенденция рулевого управления автоматически возвращаться в положение прямолинейного движения при отпускании руля.
Максимально возможное демпфирование колебаний, передаваемых от колес автомобиля на рулевое колесо при движении по неровным дорогам. Но этот процесс не должен приводить к потере обратной связи в рулевом управлении.
Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана. Это означает, что оси управляемых колес должны пересекаться в одной точке с осью задних колес (рис. «Условие Аккермана» ).
Достаточно жесткая схема всех компонентов рулевого механизма означает, что даже малые инициируемые водителем рулевые движения преобразуются в изменение направления управляемых колес, обеспечивая безопасную и точную управляемость автомобиля.
Угол поворота рулевого колеса от упора до упора по соображениям комфорта должен быть как можно меньше при парковке и движении с небольшой скоростью. Однако на средних и высоких скоростях рулевое управление не должно быть столь чувствительным.
Требования законодательства, предъявляемые к системам рулевого управления автомобилей
Требования законодательства, предъявляемые к системам рулевого управления автомобилей, описаны в международных правилах ECE-R79. К этим требованиям, наряду с базовыми функциональными требованиями, относятся максимально допустимые управляющие силы для исправной и неисправной систем рулевого управления. Эти требования регламентируют прежде всего поведение автомобиля и рулевого управления при въезде на круг и выезде с круга. Для автомобилей всех категорий: после отпускания рулевого колеса при движении автомобиля по окружности на скорости 10 км/ч, радиус поворота автомобиля должен увеличиться или как минимум остаться тем же.
Для автомобилей категории М1 (легковые автомобили с числом посадочных мест до 8): когда автомобиль в тангенциальном направлении выезжает из круга с радиусом 50 м на скорости 50 км/ч, в системе рулевого управления не должно возникать никаких необычных вибраций. В автомобилях категорий М2, М3, N1, N2 и N3 это поведение должно демонстрироваться на скорости 40 км/ч или, если это значение не достигается, то на максимальной скорости.
Это поведение также предписывается в случае неисправности у автомобилей с гидро- или электроусилителем рулевого управления. У автомобилей категории М1 это должно быть возможно в случае отказа сервопривода рулевого управления для въезда со скоростью 10 км/ч в течение 4 секунд в круг радиусом 20 м. Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).



Виды рулевого управления
В зависимости от типа редуктора системы, рулевой механизм (система рулевого управления) может быть следующих видов:
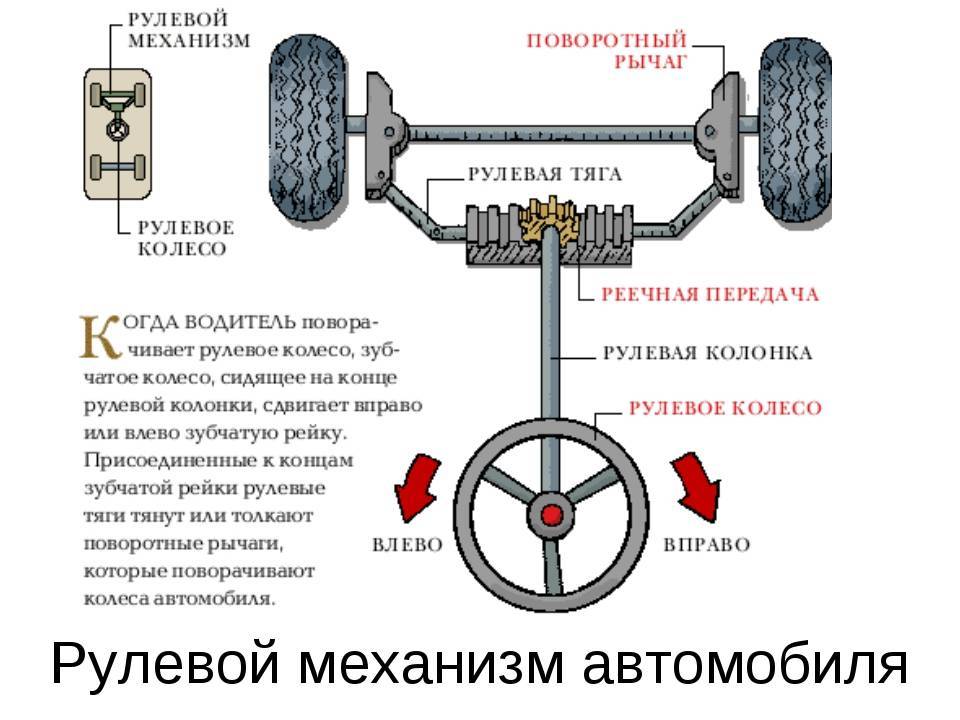
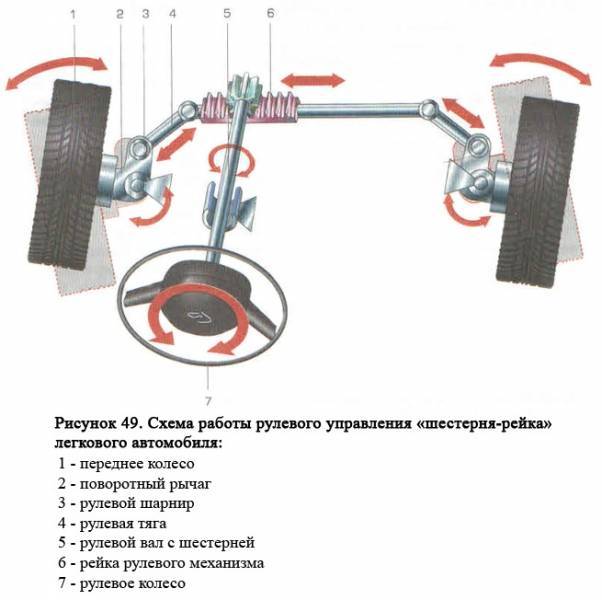
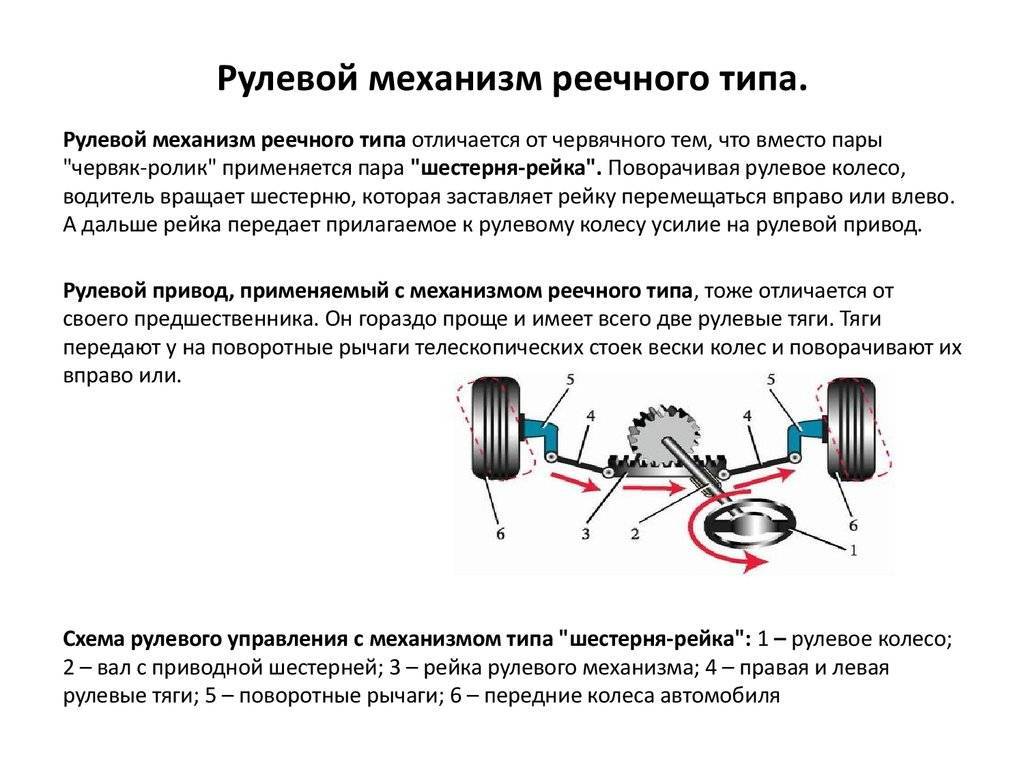
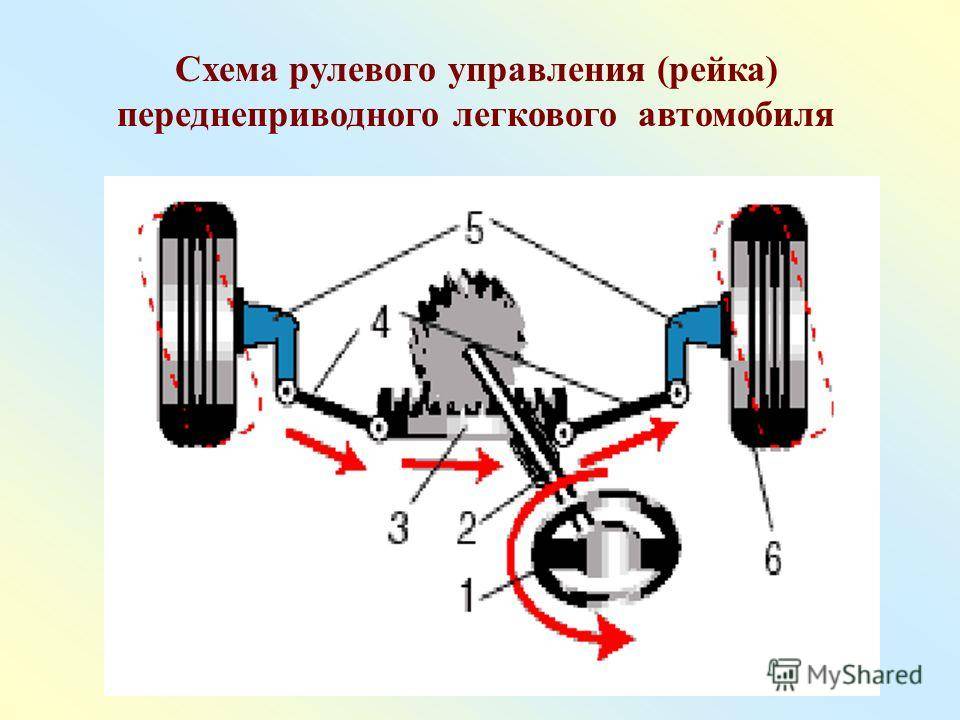
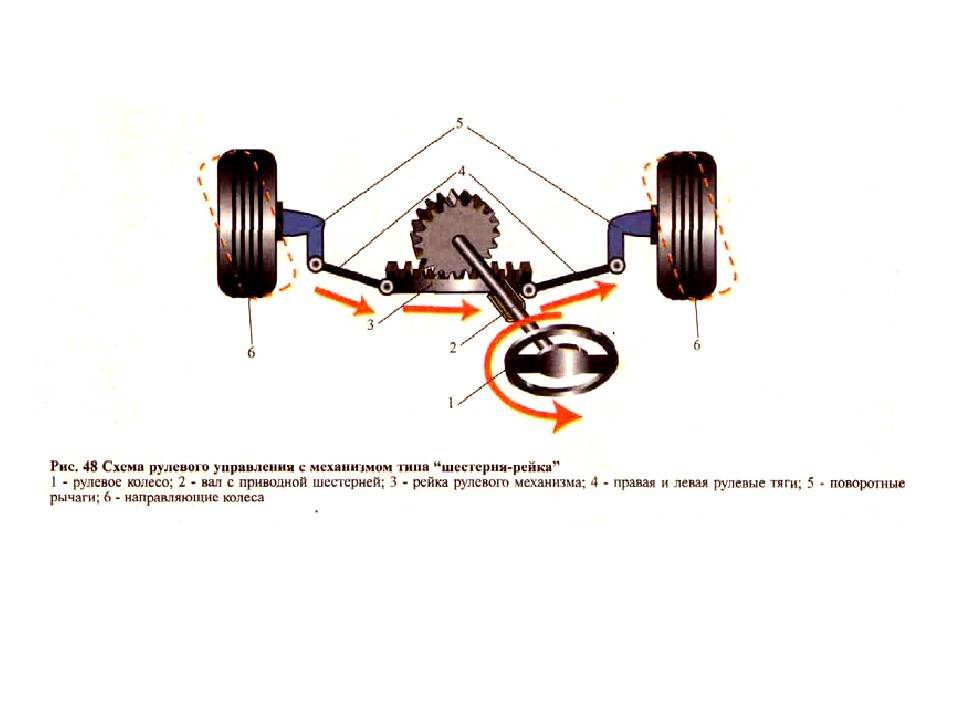
- Реечный – самый распространенный вид, используемый в легковых автомобилях. Этот вид рулевого механизма имеет простую конструкцию и отличается высоким КПД. Недостатки заключаются в том, что этот тип механизма чувствителен к возникающим ударным нагрузкам при эксплуатации в сложных дорожных условиях.
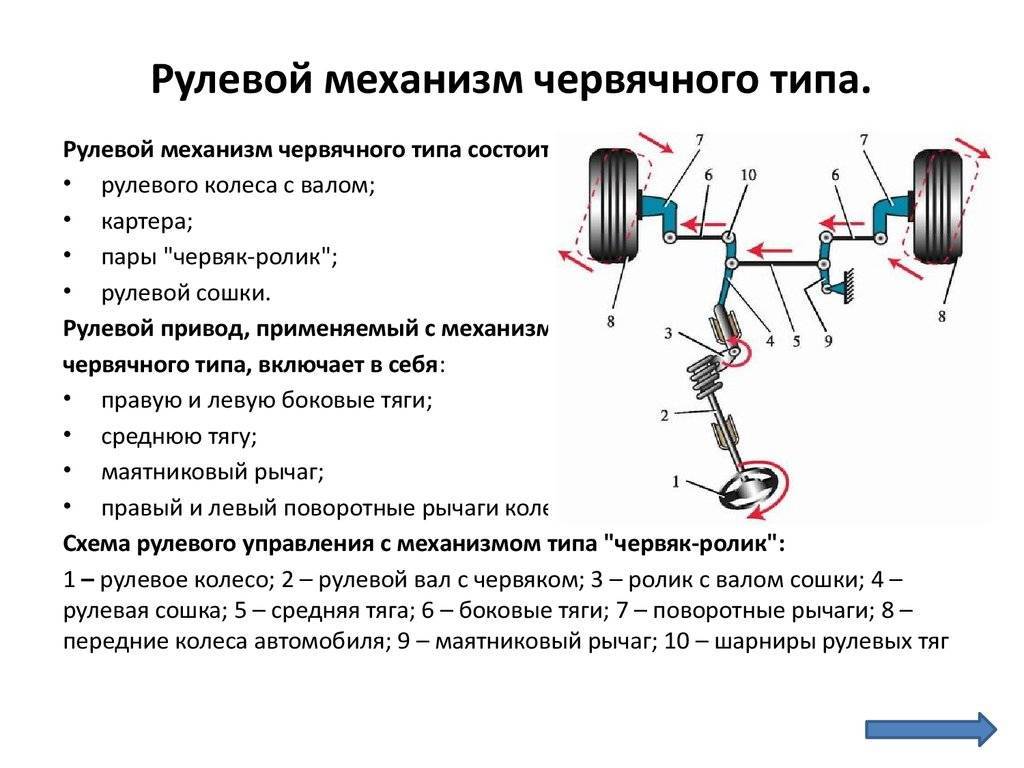
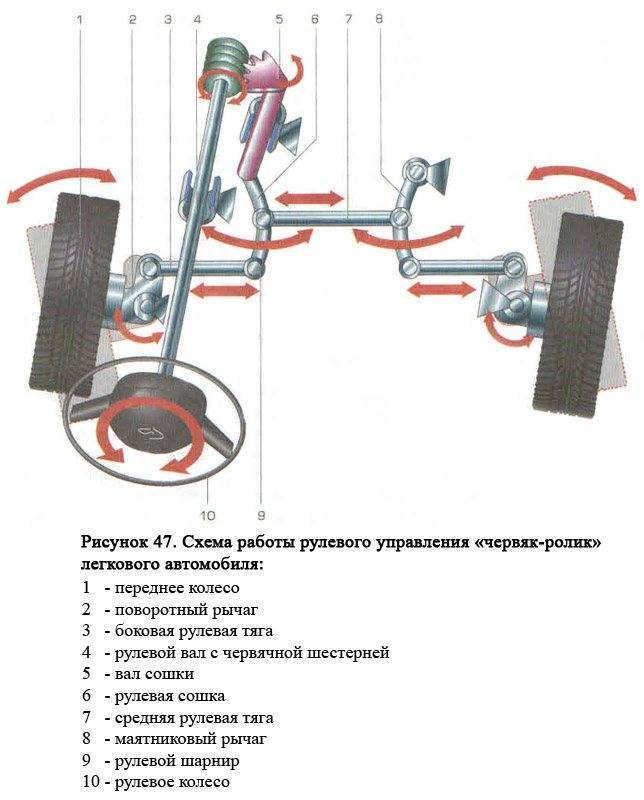
- Червячный – обеспечивает хорошую маневренность автомобиля и достаточно большой угол поворота колес. Этот вид механизма меньше подвержен влиянию ударной нагрузки, но более дорогостоящий в изготовлении.
- Винтовой – принцип работы похож на червячный механизм, однако он имеет более высокий КПД и позволяет создавать большие усилия.
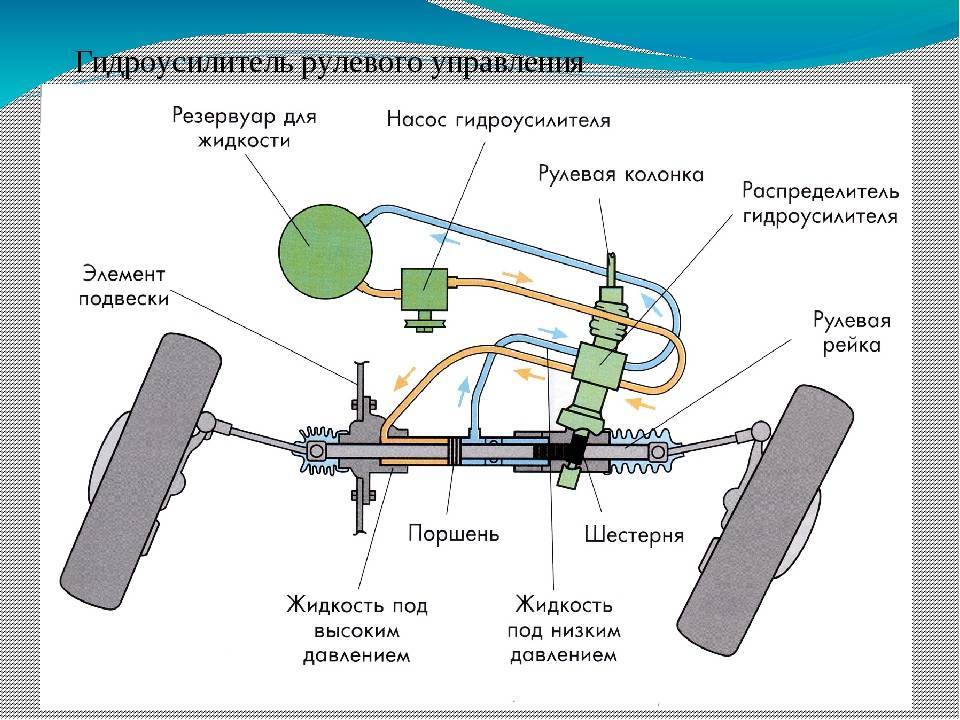
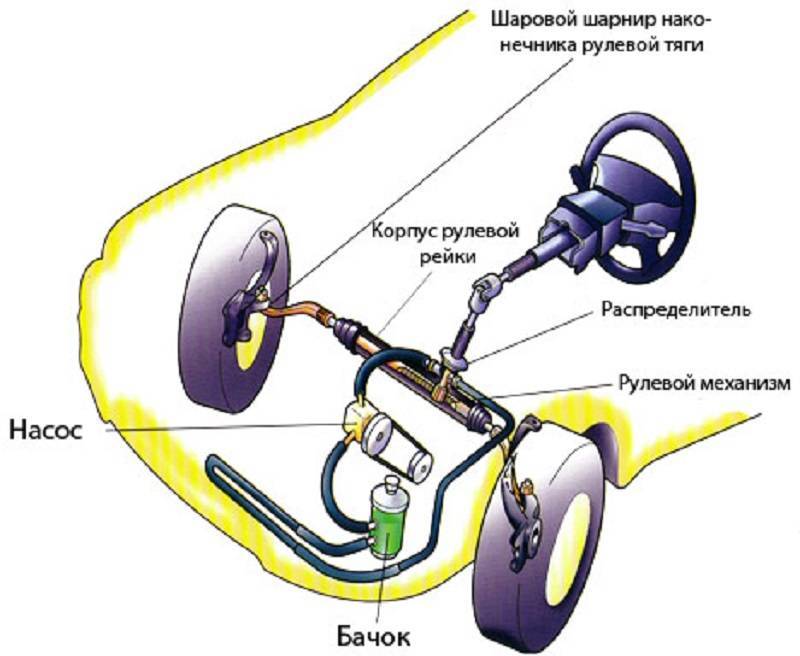
- С гидравлическим усилителем (ГУР). Его основным достоинством является компактность и простота конструкции. Гидравлическое рулевое управление среди современных транспортных средств является одним из наиболее распространенных. Недостатком такой системы является необходимость контроля уровня рабочей жидкости.
- С электрическим усилителем (ЭУР). Такая система рулевого управления с усилителем считается наиболее прогрессивной. Он обеспечивает простоту регулировки настроек управления, высокую надежность работы, экономный расход топлива и возможность управления автомобилем без участия водителя.
- С электрогидравлическим усилителем (ЭГУР). Принцип действия данной системы аналогичен системе с гидравлическим усилителем. Главное отличие заключается в том, что насос усилителя приводится в действие электродвигателем, а не ДВС.
Рулевое управление современного автомобиля может быть дополнено следующими системами:
- Активного рулевого управления (AFS) – система изменяет величину передаточного отношения в зависимости от текущей скорости. Она позволяет корректировать угол поворота колес и обеспечивает более безопасное и устойчивое движение на скользких поверхностях.
- Динамического рулевого управления – работает аналогично активной системе, однако в конструкции в этом случае вместо планетарного редуктора используется электродвигатель.
- Адаптивного рулевого управления для транспортных средств – главной особенностью является отсутствие жесткой связи между рулем автомобиля и его колесами.
Конструкция рулевой колонки

Рулевая колонка в сборе Устройство рулевой колонки представляет собой вал с шарнирами, находящийся в кожухе. Остальные элементы являются вспомогательными и обеспечивают дополнительный функционал:
- корпусы крепления переключателей и замка зажигания;
- крестовина, соединяющая руль с колонкой;
- монтажная втулка;
- контактная группа;
- крепежные элементы;
- демпфер рулевой;
- механизмы блокировки, регулировки и проч.
В устройстве рулевой колонки применяются энергопоглощающие материалы. За счет чего вся конструкция может складываться при сильном фронтальном ударе. Это способствует снижению риска травмирования водителя, а также создает дополнительную безопасность при лобовом столкновении.

Блокиратор рулевой колонки
Комфортная и безопасная рулевая колонка может включать в себя такие элементы, как:
- Промежуточный вал рулевой колонки с демпфером – смягчает удары, воспринимаемые рулевым колесом от управляемых колес при попадании автомобиля в ямы и ухабы на дороге. По сути, рулевой демпфер – это амортизатор, отвечающий за комфортное управление.
- Блокиратор рулевого вала. Это внешнее устройство, устанавливаемое на рулевую колонку, полностью исключающее возможность управления автомобилем. Блокировка используется в качестве противоугонной системы и состоит из стопора, фиксирующегося дисковым замком, не поддающимся демонтажу. Машину с заблокированным рулем можно транспортировать только с помощью эвакуатора.
- Кардан рулевой колонки относится к элементам, позволяющим не только передавать вращательное движение, но и обеспечивающим безопасность: способность карданчика сложить нижний вал с верхним уменьшает степень повреждений водителя при лобовом столкновении. Безопасная рулевая колонка может быть также оснащена вставками, легко поддающимися деформации или работающими на срез.
- Механизмы регулировки длины и наклона рулевой колонки. Они могут быть механическими и электрическими. Последние оснащают функцией памяти, что делает эксплуатацию автомобиля еще более комфортной: при выключении зажигания руль уходит в базовое положение, не мешая свободно выйти из машины, а перед началом движения возвращается в исходную точку с сохранением всех настроек. При этом функция памяти связана с настройками регулировки зеркал заднего вида и водительского сидения.
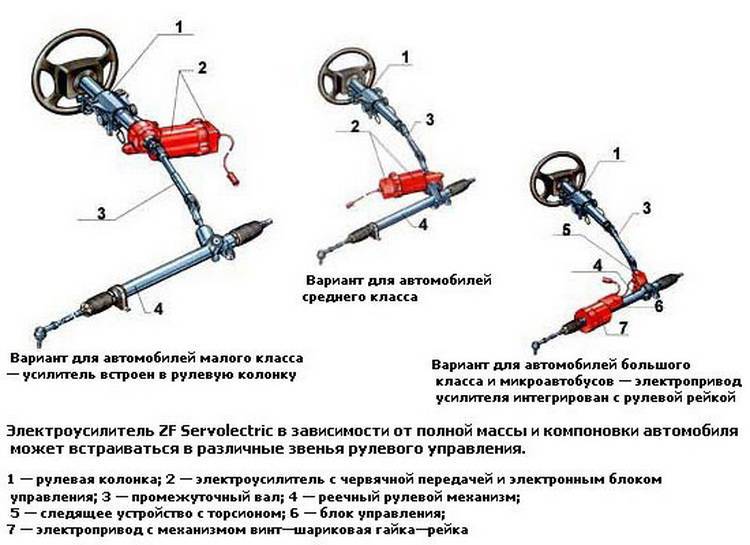
Различные используемые схемы
Тип рулевого управления в основном определяется способом преобразования в рулевом механизме. Выделяются три основных варианта:
- Реечное управление встречается наиболее часто и практически на всех легковых автомобилях. В силу своей конфигурации оно хорошо компонуется и обеспечивает высокую точность управления. Возможно использование переменного передаточного числа в зависимости от угла поворота (прогрессивная характеристика). Удобно сочетается со всеми видами усилителей и демпферов. Они же максимально парируют основной недостаток в виде излишней прозрачности – удары могут передаваться на руки водителя с большой травмирующей силой. Конструкция также минимизирует состав набора рулевых тяг и наконечников.
- Рулевое управление типа «червяк-глобоидальный ролик». Повсеместно применялось в прошлом, пока не было вытеснено реечным механизмом. Отличалось компактностью, хорошим блокированием обратных ударов и высокой прочностью. Вместе с тем создавало трудности с точностью управления и стабильностью характеристик во времени. Сохраняется на грузовиках и вездеходах.
- Механизм типа «винт-шариковая гайка» характеризуется пониженным трением и способностью выдерживать высокие нагрузки. Представляет собой значительно усовершенствованный предыдущий вариант, но работает гораздо лучше и широко используется на дорогих и тяжёлых автомобилях престижного класса, а также на больших грузовиках.

Все данные механизмы снабжаются усилителями. Они в своей работе могут использовать электрические, гидравлические и смешанные принципы.
- Электрический усилитель руля (ЭУР) находит всё большее применение на легковых автомобилях. Здесь важны такие его свойства, как компактность, быстродействие и точность. В последнее время стало особенно важным лёгкое подключение рулевого управления через ЭУР к компьютерам автомобиля, осуществляющим помощь водителю с элементами полностью автономного управления. Машины уже умеют самостоятельно парковаться, отслеживать разметку и следовать потоку без вмешательства человека. Через изменение усилия на руле также возможно передавать водителю информацию о его ошибках и рекомендации.
- Гидроусилитель руля (ГУР) был самым массовым и до сих пор ещё применяется по разным причинам, хотя в целом уступает по функциональности электрическим. Отличается высокой мощностью благодаря прямому приводу от двигателя и надёжностью, поскольку применялся давно и широко. Недостатки связаны с наличием текучей жидкости и многочисленных уплотнений. Управлять им от компьютеров сложно, но один выход всё же есть.
- Электрогидравлический гибридный усилитель (ЭГУР) частично избавляет от этого недостатка, поскольку в нём рабочее давление создаётся электрическим насосом, которым достаточно легко управлять. Но некоторая инертность всё же остаётся, также сохраняются все недостатки гидравлики.
Усовершенствование рулевых механизмов идёт по пути максимального внедрения в них принципов автоматического управления. Существуют системы типа AFS, где по команде компьютера можно оперативно менять суммарное передаточное число рулевого редуктора. Для этого используется дополнительная передача планетарного типа, где венец можно вращать отдельным электродвигателем. Электромоторы могут выполнять и иные функции, вплоть до полного устранения жёсткой связи между рулевым колесом и управляемыми колёсами. Подобно тому, как электричество и гидравлика берут на себя перемещение управляющих элементов в авиации и тяжёлой грузовой технике. Уровень надёжности и дублирование вполне это позволяют. При этом руление становится полностью адаптивным и помощь водителю максимальна.
Основные регулировочные работы по рулевому управлению легковых автомобилей
Рулевое управление современных легковых автомобилей практически не требует обслуживания, однако следует постоянно проверять состояние защитных чехлов шаровых шарниров, люфты в деталях рулевого привода.
В автомобилях старых конструкций могут выполняться регулировки зазоров: в подшипниках рулевого механизма и в зацеплении ролика с червяком; в рулевых механизмах реечного типа.
Для регулировки зазоров в подшипниках червяка рулевого механизма (рис. 12): поворачивают рулевое колесо на один — полтора оборота влево, отвертывают болты крепления нижней крышки 19 и сливают масло из картера рулевого механизма. Сняв крышку, удаляют необходимое число регулировочных прокладок 18. После этого, закрепив нижнюю крышку, снова проверяют, нет ли осевого перемещения червяка в подшипниках. При отсутствии перемещения заливают в картер масло и проверяют усилие поворота рулевого колеса (установив передние колеса на гладкой плите), которое не должно превышать 200 Н.
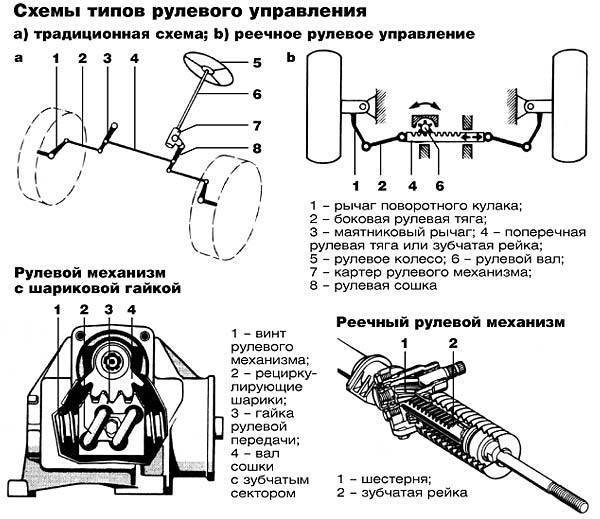

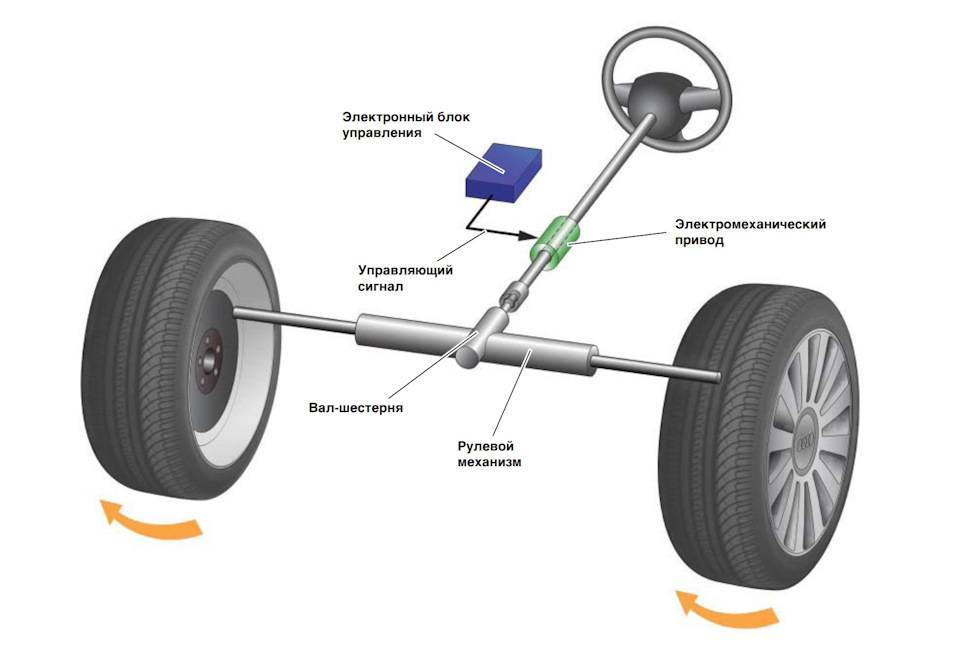


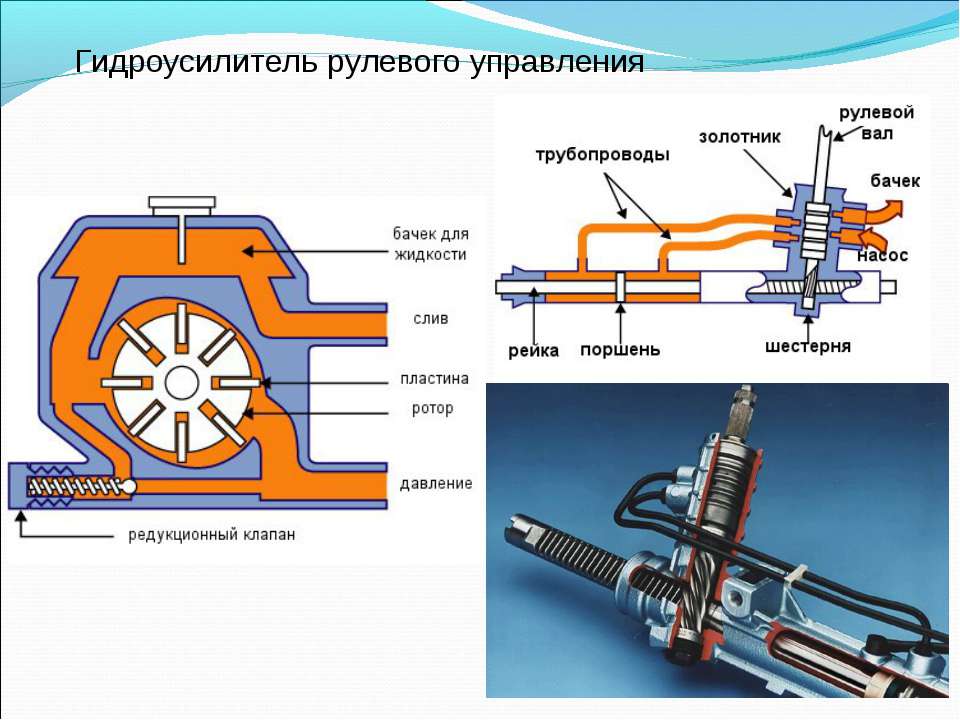
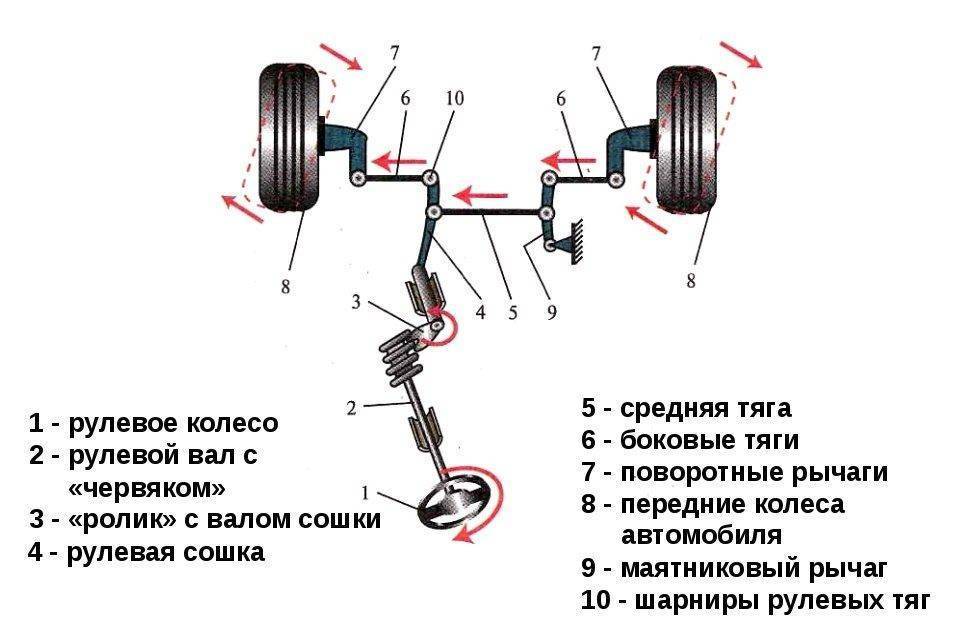
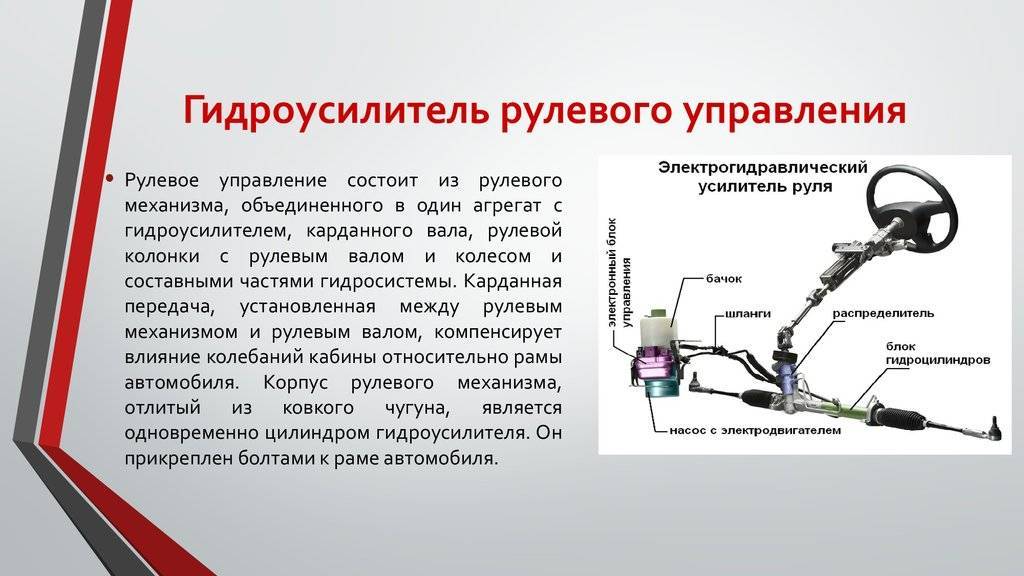
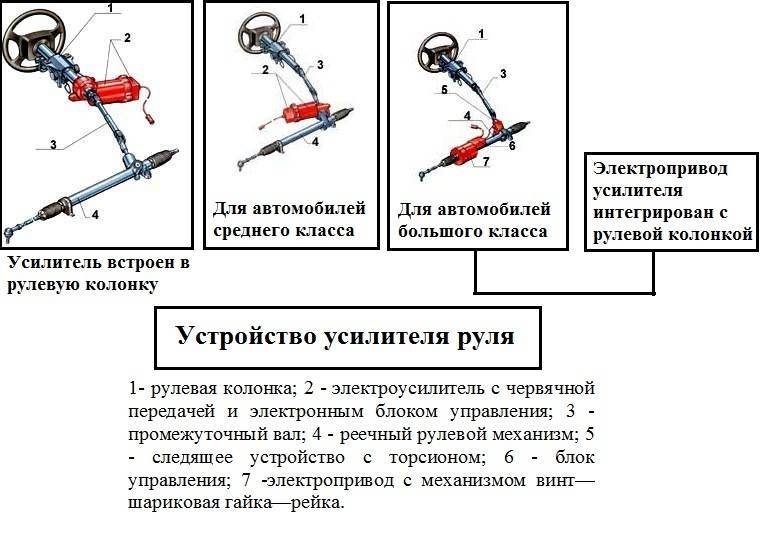
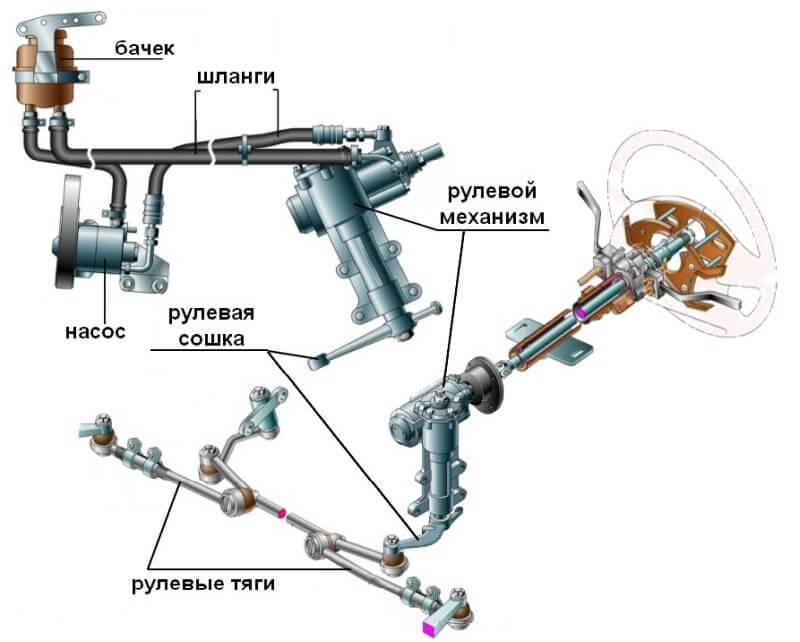
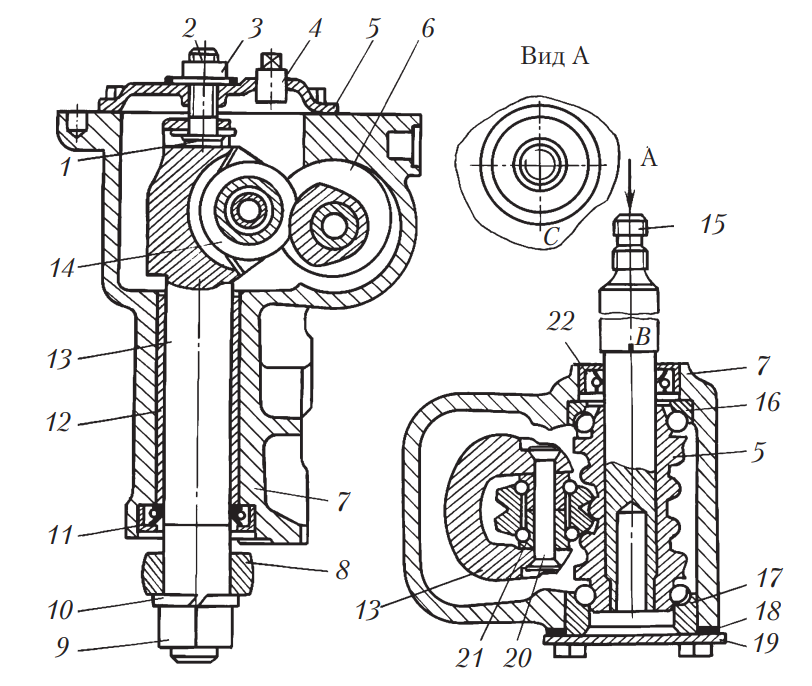
Рис. 12. Схема рулевого механизма типа червяк-ролик: 1 — пластина регулировочного винта вала сошки; 2 — регулировочный винт; 3 — контргайка; 4 — пробка; 5 — крышка картера рулевого механизма; 6 — червяк; 7 — картер рулевого механизма; 8 — сошка; 9 — гайка крепления сошки; 10 — пружинная шайба; 11 — сальник вала сошки; 12 — втулка; 13 — вал сошки; 14 — ролик вала сошки; 15 — вал червяка; 16, 17 — подшипники червяка; 18 — регулировочные прокладки; 19 — нижняя крышка картера; 20 — ось ролика; 21 — подшипник ролика; 22 — сальник вала червяка; В, С — метки
После проверки и устранения люфтов в деталях рулевого привода (в случае обнаружения повышенного люфта в рулевом механизме) проводят регулировку зазоров зацепления ролика с червяком. Для этого ослабляют контргайку 3 регулировочного винта 2 и, приподняв пружинную шайбу 10, завертывают регулировочный винт до установления зазора (не рекомендуется слишком затягивать регулировочный винт). Затем, придерживая регулировочный винт отверткой, затягивают контргайку. Убедившись в том, что рулевой механизм имеет допустимый люфт, проверяют усилие поворота рулевого колеса. Если оно выше 200 Н, ослабляют регулировочный винт.
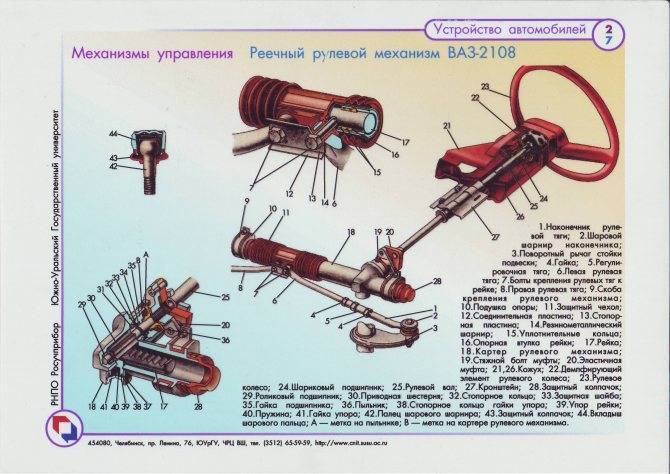
Регулировку зазоров в рулевых механизмах реечного типа производят при повышенном значении люфта рулевого управления (рис. 13). В процессе эксплуатации в конструкциях рулевых механизмов реечного типа повышенный люфт может возникать из-за увеличенного зазора между рейкой и шестерней, поэтому предприятия-изготовители рекомендуют производить затяжку регулировочного винта или гайки для устранения люфта. Устранить люфт можно и регулировочным винтом, заворачивая его на 20°.
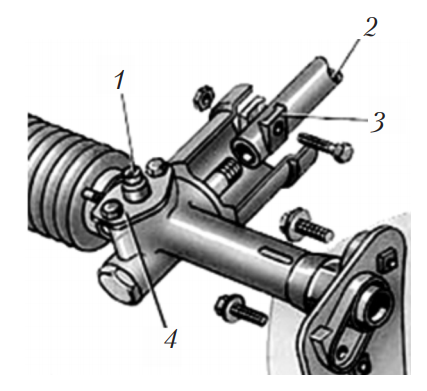
Рис. 13. Рулевое управление реечного типа автомобиля Audi: 1 — регулировочный винт; 2 — нижний вал колонки рулевого управления; 3 — хомут; 4 — крышка
В настоящее время, учитывая повышенные требования к рулевому управлению, производится не восстановление отдельных его деталей, а замена шарниров деталей рулевого управления.
Для замены шарниров рулевых тяг используют специальные съемники (рис. 14). Гайки крепления шаровых пальцев боковой и средних тяг к сошке отвертывают и выпрессовывают шаровые пальцы из отверстий сошки и рычага.
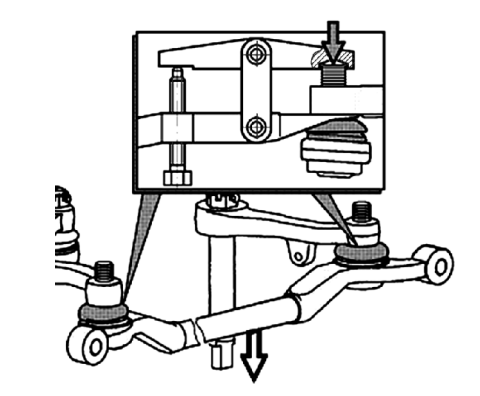
Рис. 14. Внешний вид универсального съемника для выпрессовки шаровых пальцев
Для установки нового шарнира следует очистить внутреннюю поверхность гнезда тяги под корпус шарнира и запрессовать новый шарнир в отверстие тяги до упора. Заложить в новый колпак 6…10 г смазки «Литол-24». Напрессовать колпак на шарнир с помощью универсального съемника и зафиксировать колпак на пальце стопорным кольцом.
Снимая картер рулевого механизма, отмечают количество и размещение шайб между лонжероном и картером (если они имеются), чтобы поставить их на прежнее место при установке картера. Это необходимо для сохранения соосности вала рулевого управления и вала червяка.
Типы конструкций усилителей рулевого привода
Первый тип — элементы расположены близко к рулевому колесу — высокая чувствительность, минимальная длина трубопроводов, компактность (автомобили марок «ЗИЛ», «КамАЗ»).
СИЛОВОЙ ЦИЛИНДР – РУЛЕВОЙ МЕХАНИЗМ – РАСПРЕДЕЛИТЕЛЬ
Второй тип — силовой цилиндр и распределитель далеко от механизма рулевого управления, который установлен автономно — чувствительность ухудшается, большая длина трубопроводов (автомобили марок «МАЗ», «КрАЗ»).
СИЛОВОЙ ЦИЛИНДР – РАСПРЕДЕЛИТЕЛЬ – РУЛЕВОЙ МЕХАНИЗМ
Третий тип — автономное расположение всех элементов — чувствительность хуже, большая длина трубопроводов, но удобна в обслуживании (автомобиль ГАЗ).
СИЛОВОЙ ЦИЛИНДР – РАСПРЕДЕЛИТЕЛЬ -РУЛЕВОЙ МЕХАНИЗМ
Четвертый тип — механизм рулевого управления соединен с распределителем — чувствительность хорошая, большая длина трубопроводов (автомобиль Урал-4320).
СИЛОВОЙ ЦИЛИНДР – РУЛЕВОЙ МЕХАНИЗМ/РАСПРЕДЕЛИТЕЛЬ
| Механизмы управления автомобиля
|

Встроенный гидроусилитель автомобиля ЗИЛ. Корпус распределителя крепится к промежуточной крышке картера механизма рулевого управления. Золотник распределителя крепится между упорными шариковыми подшипниками на винте. Золотник представляет собой цилиндр с двумя проточками. Упорные шарикоподшипники стянуты гайкой с подложенной под нее конической пружиной шайбой, обращенной вогнутой стороной к шарикоподшипнику. Длина золотника больше отверстия для него в корпусе распределителя, вследствие чего золотник и винт могут перемещаться в осевом направлении примерно на 1 мм в каждую сторону от среднего положения. Шесть реактивных пружин с реактивными плунжерами с каждой стороны. Пружины стремятся удержать золотник в среднем (нейтральном) положении. Если возникающая при вращении винта осевая сила больше силы предварительного сжатия реактивных пружин, то винт и золотник смещаются вправо или влево (на 1 мм) в зависимости от направления вращения винта, сообщая одну из полостей картера (силового цилиндра) механизма рулевого управления с магистралью высокого давления, а другую со сливным каналом. Масло под давлением (в современных усилителях используется давление 7—15 МПа) воздействует на тот или другой торец поршня рейки, создавая дополнительное усилие, способствующее повороту вправо или влево управляемых колес. При среднем (нейтральном) положении золотника жидкость из наcoca, заполнив обе полости силового цилиндра, вытекает через золотник в бачок гидронасоса.При повороте вправо винт, выкручиваясь из поршня-рейки, вследствие сопротивления, возникающего при повороте колес, стремится сдвинуться в осевом направлении. Как только сдвигающая сила будет больше силы предварительно сжатых пружин реактивных плунжеров, золотник переместится вправо, соединяя магистраль высокого давления с полостью вправо от поршня, а полость слева от поршня со сливным каналом. Поршень-рейка перемещается под действием усилий, возникающих при выкручивании винта и от давления жидкости.В случае поворота колес автомобиля влево золотник под аналогичным воздействием перемещается также влево, соединяя полость слева от поршня с магистралью высокого давления, а полость справа от поршня со сливным каналом.Увеличение сопротивления повороту колес, оказываемое дорогой, вызывает повышение давления в рабочей полости картера и под реактивными плунжерами. Чем больше сопротивление повороту колес, тем с большей силой золотник стремится вернуться в среднее положение. Одновременно с этим возрастает и усилие на рулевом колесе, благодаря чему у водителя возникает «чувство дороги».







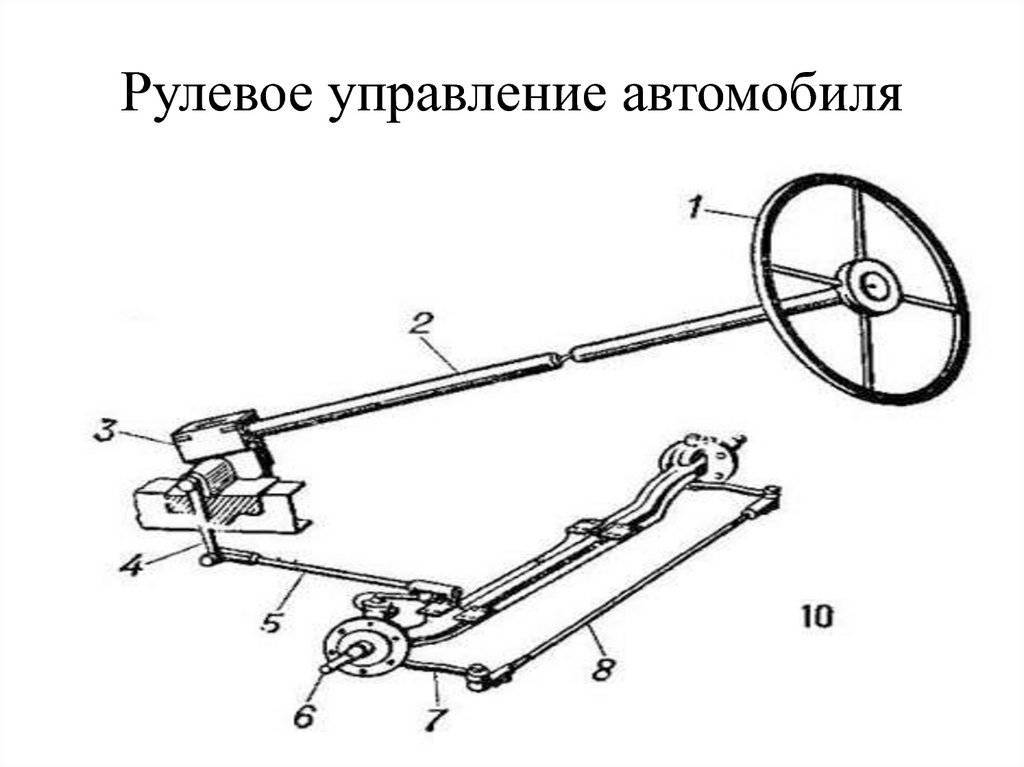
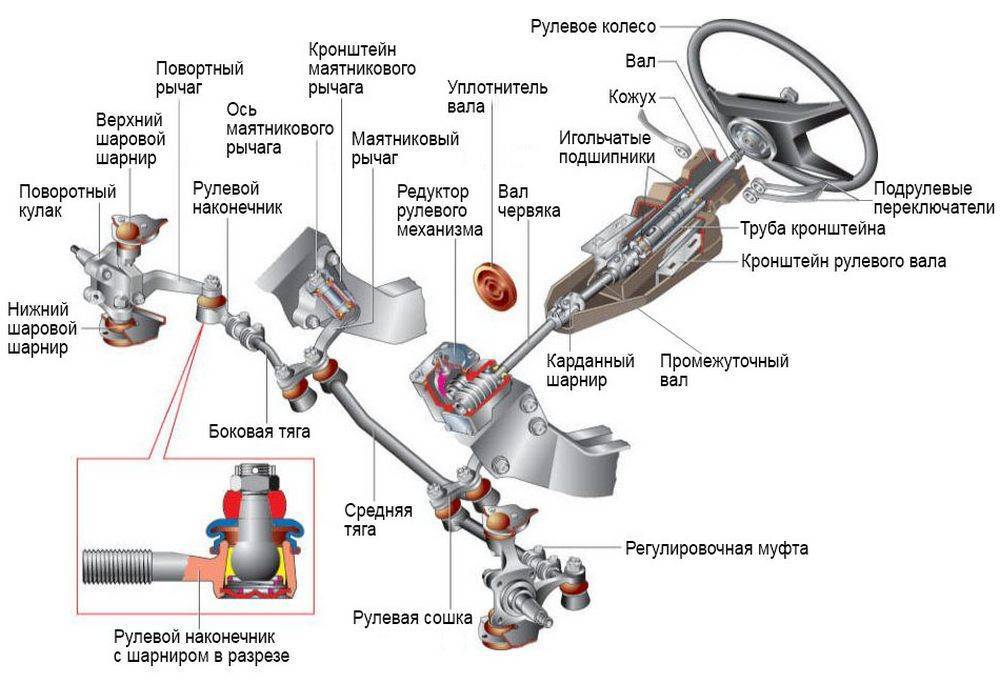
Рулевой привод с зависимой подвеской автомобиля
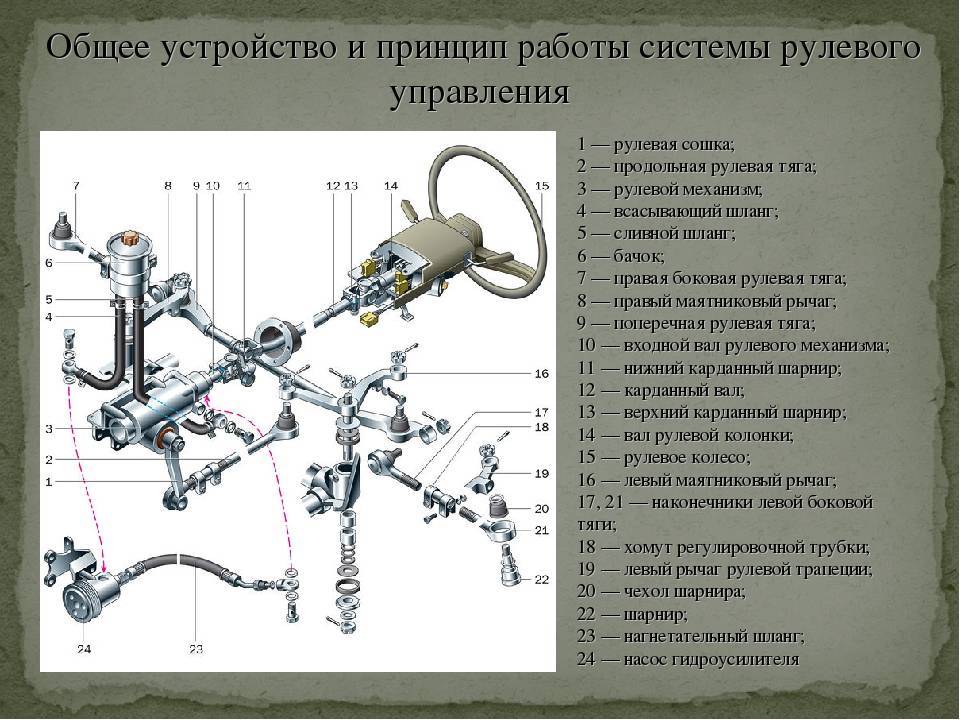
Рулевой привод грузовых автомобилей с зависимой подвеской включает в себя: сошку, продольную тягу, два левых поворотных рычага, поперечную тягу, правый поворотный рычаг, рулевую трапецию (шарнирный четырехугольник, образованный средней частью балки передней оси, поперечной тягой и левым и правым поворотными рычагами). При движении автомобиля по неровной дороге на детали рулевого привода (сошку, продольную и поперечную рулевые тяги, рулевые рычаги) действуют большие нагрузки. Поэтому в рулевой привод вводят пружины для смягчения толчков и для автоматического устранения зазоров, возникающих при изнашивании деталей. Поперечная рулевая тяга на одном конце имеет левую резьбу и правую на другом для навинчивания наконечников крепления шаровых шарниров. Вследствие этого можно изменять расстояние между шарнирами при регулировании схождения управляемых колес.
Устройство рулевого управления автомобиля
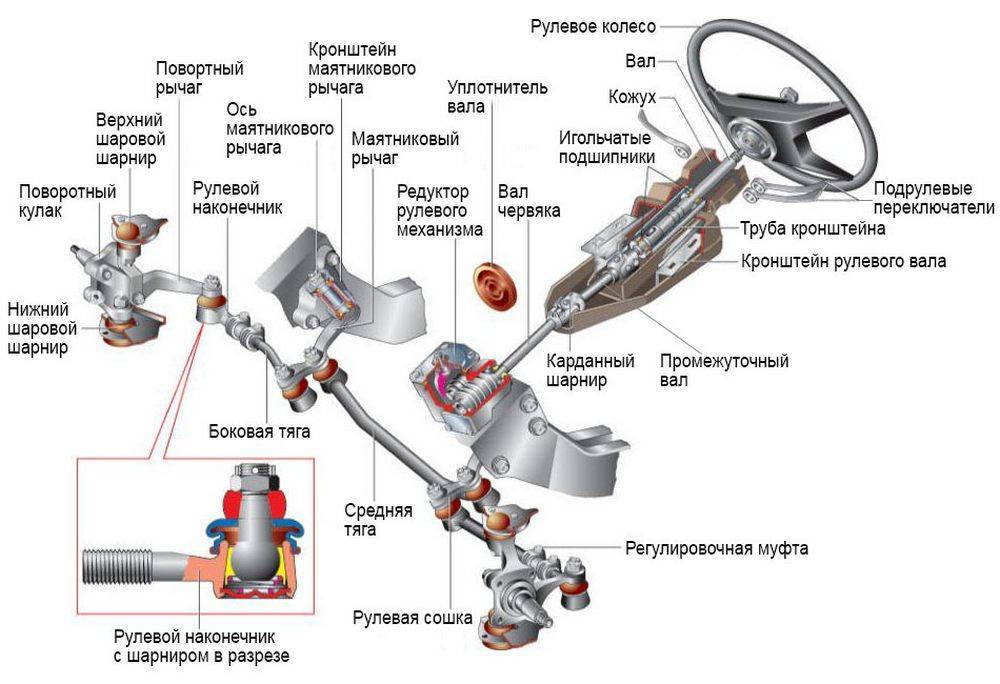 Вот из каких составных частей состоит система рулевого управления практически любого колесного транспортного средства:
Вот из каких составных частей состоит система рулевого управления практически любого колесного транспортного средства:
- рулевое колесо;
- колонка;
- кардан;
- рулевой механизм;
- датчик;
- усилитель;
- привод.
Рулевое колесо – это привычный всем автомобильный руль, который находится в салоне автомобиля и с помощью которого водитель выполняет поворот.
Колонка – это основание руля, на котором он закреплен. Также она обеспечивает передачу усилия с рулевого колеса на кардан.
Кардан представляет собой вал, который обеспечивает передачу усилия с руля на усилитель.
Усилитель – это устройство, предназначенное для усиления усилия, которое автомобилист прилагает для выполнения поворота, а также для облегчения управления транспортным средством.
Рулевой механизм предназначен для преобразования вертикального вращения кардана в горизонтальное усилие, которое заставляет поворачиваться колеса транспорта.
Привод представляет собой систему тяг и направляющих, которые передают усилие с рулевого механизма непосредственно на колеса, тем самым обеспечивая выполнение поворота.
Все элементы конструкции, описанные выше, располагаются в передней части рамы автомобиля.
Следует отметить, что выше описано общее устройство узла. Некоторые нюансы конструкции могут отличаться в зависимости от модели машины. Однако в целом она идентична на всех автомобилях.
Главное назначение системы – обеспечения возможности выполнения транспортным средством поворота в необходимый момент.
Рулевое управление для автомобилей